手册
Version:
2019.4
- Unity 用户手册 (2019.4 LTS)
- 包
- 已验证包
- 2D Animation
- 2D Common
- 2D Path
- 2D Pixel Perfect
- 2D PSD Importer
- 2D SpriteShape
- Adaptive Performance
- Adaptive Performance Samsung Android
- Addressables
- Advertisement
- Alembic
- Analytics Library
- Android Logcat
- AR Foundation
- AR Subsystems
- ARCore XR Plugin
- ARKit Face Tracking
- ARKit XR Plugin
- Asset Bundle Browser
- Barracuda
- Burst
- Core RP Library
- Custom NUnit
- Editor Coroutines
- Google Resonance Audio
- Google VR Android
- Google VR iOS
- High Definition RP
- High Definition RP Config
- In App Purchasing
- Input System
- Lightweight RP
- Magic Leap XR Plugin
- Mathematics
- Mobile Notifications
- Multiplayer HLAPI
- Oculus Android
- Oculus Desktop
- Oculus XR Plugin
- OpenVR Desktop
- Polybrush
- Post Processing
- ProBuilder
- Profile Analyzer
- Quick Search
- Remote Config
- Scriptable Build Pipeline
- Searcher
- Settings Manager
- Shader Graph
- Subsystem Registration
- Test Framework
- TextMesh Pro
- 时间轴
- Unity Collaborate
- Universal RP
- Visual Effect Graph
- Vuforia Engine AR
- Windows Mixed Reality
- Windows XR Plugin
- XR Interaction Subsystems
- XR Legacy Input Helpers
- XR Plugin Management
- 预览包
- 2D Entities
- 2D IK
- AI Planner
- Animation Rigging
- Asset Graph
- Build Report Inspector
- Cinemachine
- Code Coverage
- Collections
- Device Simulator
- DOTS Editor
- Entities
- FBX Exporter
- Film and TV Toolbox
- Game Foundation
- Havok Physics for Unity
- Hybrid Renderer
- Immediate Window
- Jobs
- Kinematica
- 内存性能分析器 (Memory Profiler)
- MeshSync
- ML Agents
- MockHMD XR Plugin
- Package Development
- Package Validation Suite
- Performance testing API
- Platforms
- Platforms Android
- Platforms Linux
- Platforms macOS
- Platforms Web
- Platforms Windows
- PlayableGraph Visualizer
- ProGrids
- Project Tiny Full
- Streaming Image Sequence
- Terrain Tools
- UI Builder
- Unity AOV Recorder
- Unity Distribution Portal
- Unity NetCode
- Unity Physics
- Unity Recorder
- Unity Reflect
- Unity Render Streaming
- Unity Simulation Client
- Unity Simulation Core
- Unity Transport
- Unity User Reporting
- USD
- Vector Graphics
- WebGL Publisher
- WebRTC
- Xiaomi SDK
- XR Interaction Toolkit
- 内置包
- 2D Sprite
- 2D Tilemap Editor
- AI
- Android JNI
- 动画
- Asset Bundle
- Audio
- 布料
- Director
- Image Conversion
- IMGUI
- JSONSerialize
- Particle System
- 物理 (Physics)
- Physics 2D
- Screen Capture
- Subsystems
- Terrain
- Terrain Physics
- Tilemap
- UI
- UIElements
- Umbra
- Unity Analytics
- Unity UI
- Unity Web Request
- Unity Web Request Asset Bundle
- Unity Web Request Audio
- Unity Web Request Texture
- Unity Web Request WWW
- Vehicles
- Video
- VR
- Wind
- XR
- 按关键字排列的包
- Unity 的 Package Manager
- 创建自定义包
- 已验证包
- Unity 2019 中的新功能
- 在 Unity 中操作
- 安装 Unity
- Unity 的界面
- 资源工作流程
- 创建游戏玩法
- 编辑器功能
- 分析
- 升级指南
- 导入
- 输入
- 2D
- 图形
- 渲染管线
- 摄像机
- 后期处理
- 光照
- 网格、材质、着色器和纹理
- 网格组件
- 创建和使用材质
- 纹理
- 编写着色器
- 标准着色器
- 标准粒子着色器
- 旧版着色器
- 内置着色器的用途和性能
- 普通着色器系列
- 透明着色器系列
- 透明镂空着色器系列
- 自发光着色器系列
- 反光着色器系列
- 反射顶点光照 (Reflective Vertex-Lit)
- 反光漫射 (Reflective Diffuse)
- 反光镜面反射 (Reflective Specular)
- 反光凹凸漫射 (Reflective Bumped Diffuse)
- 反光凹凸镜面反射 (Reflective Bumped Specular)
- 反光视差漫射 (Reflective Parallax Diffuse)
- 反光视差镜面反射 (Reflective Parallax Specular)
- 反光法线贴图无光照 (Reflective Normal Mapped Unlit)
- 反光法线贴图顶点光照 (Reflective Normal mapped Vertex-lit)
- 着色器参考
- 粒子系统
- 选择粒子系统解决方案
- 内置粒子系统
- 使用内置粒子系统
- 粒子系统顶点流和标准着色器支持
- 粒子系统 GPU 实例化
- 粒子系统 C# 作业系统集成
- 组件和模块
- 粒子系统 (Particle System)
- 粒子系统模块
- 粒子系统 (Particle System) 主模块
- Emission 模块
- Shape 模块
- Velocity over Lifetime 模块
- Noise 模块
- Limit Velocity Over Lifetime 模块
- Inherit Velocity 模块
- Force Over Lifetime 模块
- Color Over Lifetime 模块
- Color By Speed 模块
- Size over Lifetime 模块
- Size by Speed 模块
- Rotation Over Lifetime 模块
- Rotation By Speed 模块
- External Forces 模块
- Collision 模块
- Triggers 模块
- Sub Emitters 模块
- Texture Sheet Animation 模块
- Lights 模块
- Trails 模块
- Custom Data 模块
- Renderer 模块
- 粒子系统力场 (Particle System Force Field)
- 内置粒子系统示例
- Visual Effect Graph
- 创建环境
- 天空
- 视觉效果组件
- 高级渲染功能
- 优化图形性能
- 颜色空间
- 图形教程
- 物理系统
- 脚本
- 多玩家和联网
- 音频
- 视频概述
- 动画
- 用户界面 (UI)
- 导航和寻路
- Unity 服务
- 设置项目启用 Unity 服务
- Unity Organizations
- Unity Ads
- Unity Analytics
- Unity Cloud Build
- Automated Build Generation
- 支持的平台
- 支持的 Unity 版本
- 版本控制系统
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Git 配置
- 使用 Unity Editor 对 Unity Cloud Build 进行 Git 配置
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Mercurial 配置
- 使用 Unity Editor 对 Unity Cloud Build 进行 Mercurial 配置
- 将 Apache Subversion (SVN) 用于 Unity Cloud Build
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Perforce 配置
- 使用 Unity Editor 对 Unity Cloud Build 进行 Perforce 配置
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Plastic 配置
- 发布到 iOS
- 高级选项
- 在 Unity Cloud Build 中使用可寻址资源
- 编译清单
- Cloud Build REST API
- Unity Cloud Content Delivery
- Unity IAP
- 设置 Unity IAP
- 跨平台指南
- 应用商店指南
- 实现应用商店
- Unity Collaborate
- Unity Cloud Diagnostics
- Unity Integrations
- Multiplayer 服务
- XR
- 开源代码仓库
- Asset Store 发布
- 平台开发
- 将“Unity 用作库”用于其他应用程序
- 启用深层链接
- 独立平台
- macOS
- Apple TV
- WebGL
- iOS
- Android
- Windows
- 将 Unity 集成到 Windows 和 UWP 应用程序中
- Windows 通用
- 通用 Windows 平台
- 移动平台开发者检查清单
- 实验性
- 旧版主题
- 最佳实践指南
- 专家指南
- 术语表
- Unity 用户手册 (2019.4 LTS)
- 在 Unity 中操作
- 编辑器功能
- Project Settings
- Physics 2D
Physics 2D
使用 Physics 2D 设置可应用 2D 物理的全局设置。
注意:要管理 3D 物理的全局设置,请改用 Physics 3D 设置。
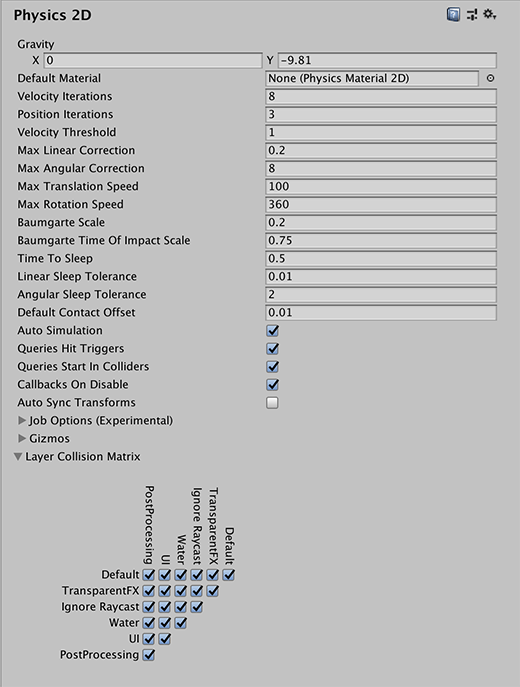
Physics 2D 设置定义了物理模拟精度的限制。一般来说,更精确的模拟需要更多的处理开销,因此这些设置提供了一种精度与性能的折衷方法。有关更多信息,请参阅本手册的物理部分。
| 属性 | 功能 |
|---|---|
| Gravity | 设置应用于所有 2D 刚体游戏对象的重力大小。通常,仅为 y 轴的负方向设置重力。 |
| Default Material | 设置在没有为单独 2D 碰撞体分配材质的情况下需要使用的 2D 物理材质。 |
| Velocity Iterations | 设置物理引擎为处理速度影响而进行的迭代次数。数字越大,物理属性越准确,但代价是 CPU 时间增加。 |
| Position Iterations | 设置物理引擎为处理位置变化而进行的迭代次数。数字越大,物理属性越准确,但代价是 CPU 时间增加。 |
| Velocity Threshold | 设置弹性碰撞的阈值。Unity 将相对速度低于此值的碰撞视为非弹性碰撞(即,碰撞的游戏对象不会相互反弹)。 |
| Max Linear Correction | 设置解算约束时使用的最大线性位置校正(范围从 0.0001 到 1000000)。这有助于防止过冲。 |
| Max Angular Correction | 设置解算约束时使用的最大角度校正(范围从 0.0001 到 1000000)。这有助于防止过冲。 |
| Max Translation Speed | 设置任何物理更新期间 2D 刚体游戏对象的最大线性速度。 |
| Max Rotation Speed | 设置任何物理更新期间 2D 刚体游戏对象的最大旋转速度。 |
| Baumgarte Scale | 设置用于确定 Unity 解算碰撞重叠速度的缩放因子。 |
| Baumgarte Time of Impact Scale | 设置用于确定 Unity 解算撞击时间重叠速度的缩放因子。 |
| Time to Sleep | 在 2D 刚体停止移动之后而进入睡眠状态之前必须经过的时间(以秒为单位)。 |
| Linear Sleep Tolerance | 设置线性速度,在低于该速度时,2D 刚体在经过 Time to Sleep 过后进入睡眠状态。 |
| Angular Sleep Tolerance | 设置旋转速度,在低于该速度时,2D 刚体在经过 Time to Sleep 过后进入睡眠状态。 |
| Default Contact Offset | 将碰撞体的接近距离值设置为相接触,即使它们实际上没有接触。距离小于其 contactOffset 值之和的碰撞体将产生接触。因此,即使在将这些对象稍微分开时,也可使碰撞检测系统预测性地强制执行接触约束。 警告:将此值减小得太多可能会削弱 Unity 计算连续多边形碰撞的能力。相反,此值增大得过多可能会造成顶点碰撞瑕疵。 |
| Auto Simulation | 启用此选项可自动运行物理模拟或允许对其进行显式控制。 |
| Queries Hit Triggers | 如果希望让标记为__触发器__的 2D 碰撞体在任何物理查询(如线性投射或射线投射)与它们相交时返回命中,请启用此选项。默认已启用。 |
| Queries Start In Colliders | 如果希望使 2D 碰撞体中启动的物理查询检测是在哪个碰撞体中开始的,请启用此选项。 |
| Callbacks On Disable | 启用此选项可在禁用具有接触点的碰撞体时生成碰撞回调。 |
| Auto Sync Transforms | 启用此选项可自动将变换更改与物理系统同步。 |
| Job Options (Experimental) | 请参阅下面的 Job Options 部分。 |
| Gizmos | 请参阅下面的 Gizmos 部分。 |
| Layer Collision Matrix | 定义基于层的碰撞检测系统的行为方式。选择碰撞矩阵中的哪些层与其他层交互(勾选相应层即可)。 |
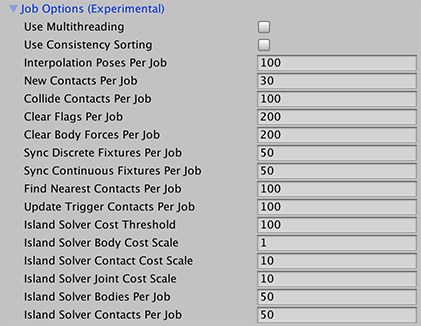
Job Options
Job Options 部分中的设置允许您使用 C# 作业系统来配置多线程物理设置。
| 属性: | 功能: |
|---|---|
| Use Multithreading | 启用此选项会使用作业系统执行模拟步骤,并使用这些选项中的其余部分控制如何实现该功能。 |
| Use Consistency Sorting | 如果保持一致的处理顺序对于模拟十分重要,请启用此选项。 在多个 CPU 线程中执行模拟步骤会生成单独的数据批次。处理这些单独的批次会降低处理顺序的确定性,不过会生成更快的结果。 |
| Interpolation Poses Per Job | 设置在每个模拟作业中进行插值的最小 2D 刚体对象数。 |
| New Contacts Per Job | 设置在每个模拟作业中要查找的最小新接触数。 |
| Collide Contacts Per Job | 设置在每个模拟作业中要碰撞的最小接触数。 |
| Clear Flags Per Job | 设置在每个模拟作业中要清除的最小标志数。 |
| Clear Body Forces Per Job | 设置在每个模拟作业中要清除的最小实体数。 |
| Sync Discrete Fixtures Per Job | 设置在每个模拟作业的离散孤岛解算过程中,要在粗筛阶段中同步的最小灯具数。 |
| Sync Continuous Fixtures Per Job | 设置在每个模拟作业的连续孤岛解算过程中,要在粗筛阶段中同步的最小灯具数。 |
| Find Nearest Contacts Per Job | 设置在每个模拟作业中要查找的最小最近接触数。 |
| Update Trigger Contacts Per Job | 设置在每个模拟作业中要更新的最小触发器接触数。 |
| Island Solver Cost Threshold | 设置在离散孤岛解算过程中某个孤岛中所有实体、接触和关节的最小阈值成本。 |
| Island Solver Body Cost Scale | 设置在离散孤岛解算过程中每个实体的成本规模。 |
| Island Solver Contact Cost Scale | 设置在离散孤岛解算过程中每个接触的成本规模。 |
| Island Solver Joint Cost Scale | 设置在离散孤岛解算过程中每个关节的成本规模。 |
| Island Solver Bodies Per Job | 设置在执行孤岛解算时在每个模拟作业中要解算的最小实体数。 |
| Island Solver Contacts Per Job | 设置在执行孤岛解算时在每个模拟作业中要解算的最小接触数。 |
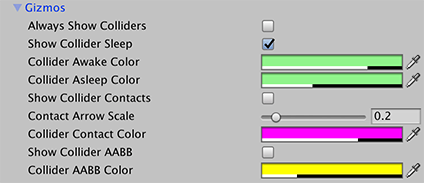
Gizmos
| 属性: | 功能: |
|---|---|
| Always Show Colliders | 启用此选项可显示碰撞体辅助图标(即使未选择辅助图标也显示)。 |
| Show Collider Sleep | 启用此选项可显示每个碰撞体的睡眠状态。 |
| Collider Awake Color | 设置颜色以指示碰撞体(实体)处于唤醒状态。 |
| Collider Asleep Color | 设置颜色以指示碰撞体(实体)处于睡眠状态。 |
| Show Collider Contacts | 启用此选项可显示每个辅助图标的当前接触点。 |
| Contact Arrow Scale | 设置碰撞体辅助图标上显示的接触箭头的大小。 |
| Collider Contact Color | 设置辅助图标颜色以指示碰撞体接触点。 |
| Show Collider AABB | 启用此选项可显示碰撞体的包围盒。 |
| Collider AABB Color | 设置碰撞体包围盒的辅助图标颜色。 |
2018–10–02 页面已修订
统一设置 (Unified Settings) 更新
版权所有 © 2020 Unity Technologies. Publication 2019.4